Enhanced Regulatory Control
Enhanced Regulatory Control 이란 ?
- 기존의 PID Controller 에 대한 Tuning 을 통한 최적화와 Control Loop 에 대한 평가와 개선을 통해 PID Controller의 제어성능을 향상시키는 것을 의미합니다.
1. PID Tuning 에 대한 개요
Process Control : 공정제어의 주요 목표는 제어하고자 하는 주요 공정 제어변수(Controlled Variable)를 원하는 목표 값을 유지하도록 제어하는 것입니다.
공정제어를 통해 이를 자동화 할 경우 다음의 이점들이 생깁니다.
l 제품의 Quality 가 일정하게 생산되므로 제품의 상품성이 높아짐.
l 공정 운전의 제약조건을 넘지 않도록 유지함으로써 운전 안정성을 유지
l 운전원이 지속적으로 조절변수 (Manipulated Variable)를 움직이지 않아도 되므로 운전성이 향상됨.
이러한 자동 운전을 위해 개발된 제어 메커니즘 중 하나가 PID Controller 입니다.
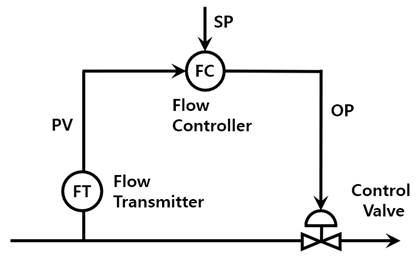
PID Control Loop 의 작동을 예시를 들어 보겠습니다.
|
순서 |
PID Action |
Action 예시 |
|
A |
현재 값을 측정 (PV) |
현재 유량이 얼마인가? |
|
B |
현재값과 설정값을 비교 (SP) |
목표 유량보다 작은가? |
|
C |
Controller Output 값을 계산 (OP) |
목표 유량을 유지 위해 Valve OP값을 얼마나 늘려야 할까? |
|
D |
계산된 값을 실제 Valve 에 전달 |
OP 값을 증가 |
|
E |
다시 A로 돌아감 (반복) |
반복 |
2. PID Controller 의 구성
PID Controller 에 대한 일반적인 제어식은 다음과 같습니다.
상세한 내용은 Process Control 에 대한 서적 등의 전문 내용을 참조하시기 바랍니다.

• e(t) : PV의 Set Point와의 Error,
• Kc : Proportional Gain of the Controller → P
• τi : Integral Time or Reset Time → I
• τd : Derivative Time or Pre-Act Time → D
• M(t) : Output at Steady State
A. P (Proportional control) Controller
![]()
i. 비례제어(Proportional Control)는 Controller Gain Kc를 조절하여 Error 을 최소화하는 제어방식
ii. Controller Gain을 증가시키면 편차(Offset)을 줄일 수 있지만 근본적으로 Offset의 완전한 제거는 이루어지지 않음
iii. 과도한 Controller Gain의 증가는 Offset을 줄여 주긴 하지만 Control Loop의 안정성을 저하시켜 진동하거나 발산하는 응답을 줄 수 있음
B. PI (Proportional Integral control) Controller

i. 적분 제어(Integral Control)란 편차 (Error) 의 시간 적분에 비례해 조절하는 제어방식임.
ii. 외란 또는 설정값의 변화로 인한 편차를 적분동작을 통해 Offset을 줄임.
iii. I 계수가 감소하면(적분동작이 커지면) 응답속도가 빨라지지만 진동이 생길 수 있음.
C. PID ((Proportional Integral Derivative) Controller

i. 미분 제어(Derivative Control)란 외란 등에 의해 생긴 편차를 빨리 감소시키기 위하여 편차 (error)의 미래거동을 예측하여 제어하는 것을 말함
ii. P I 제어는 현재 또는 과거의 Error 에 관련되어 MV 크기를 정하므로, 온도나 Level 과 같이 시간지연이 크거나 공정이 느릴 경우 제어 성능 저하가 있을 수 있기 때문에 편차미분(변화속도)에 비례하여 편차가 일어나는 초기에, 큰 수정 동작을 줌으로써 좋은 Control Performance를 얻을 수 있음
iii. PV 에 Noise 가 심한 공정의 경우 MV 의 Action 이 커지므로 공정이 불안해질 수 있으므로 합당한 곳에 사용해야 함.
3. PID Tuning 일반론
대표적인 제어 대상인 레벨 (Level), 유량 (Flow), 온도 (Temp.), 압력 (Press.)등에 대한 PID 튜닝은
실제 PID 제어기의 동특성에 의해 결정되며, 따라서 공정에 대한 정확한 공정의 동특성을 이해하고 튜닝해야 합니다.
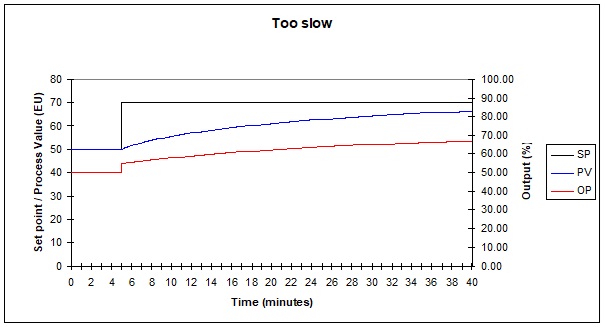
4. PID Tuning 이 잘못된 경우 발생하는 문제
PID Tuning 이 잘못된 사례는 다음과 같습니다.
l 유량계의 설정값을 변경했는데 측정 값이 따라가는데 15분이 넘게 걸림.(일반적으로 유량계는 반응이 빠른 편임.)
l SP 값을 변경시켰을 때 PV 의 헌팅이 심해서 공정이 흔들림
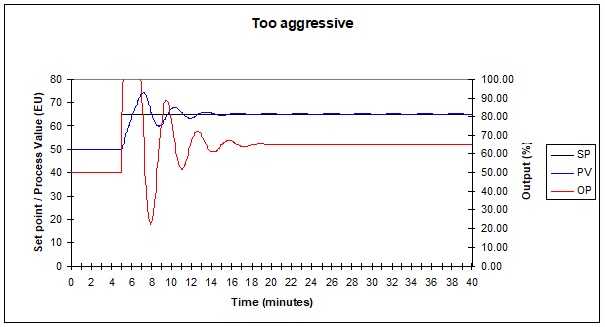
l 큰 외란이 없음에도 불구하고 PV 값의 헌팅이 심함
l PV 의 값을 안정화 시키기 위한 MV 값의 Opening 움직임 진폭이 생각보다 큼.(ex.MV 15%-> 80% → 15%)
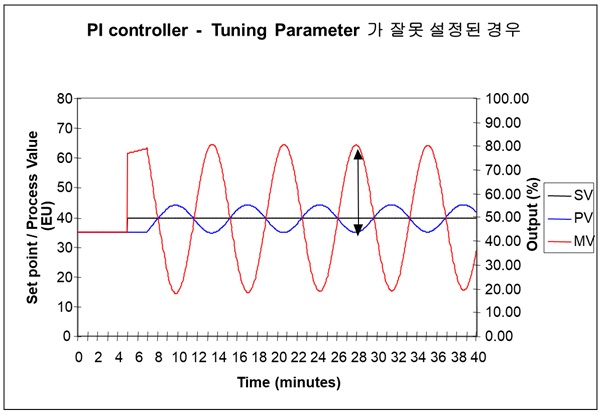
l Controller 자체는 문제가 없으나 제어기 성능이 따라주지 않아 운전원이 Manual 으로 Opening 을 조절함.
5. PID Tuning 개선 방법
PID Tuning 에 대한 접근은 크게 2가지로 생각해볼 수 있습니다.
A. Control Loop 개선
I. 설명 : PID Control Loop 의 구조를 개선해 제어 성능을 향상
II. 원인 : Control Loop 를 잘못 설계했거나 공장의 revamp 등으로 인해 Control Loop 에 변경이 생겼지만 기존의 방식으로 유지하는 경우 발생
III. 대처방법 : 공정의 Control Loop 에 대한 재검토 및 Loop 재설계를 통해 제어성능을 향상 시킴
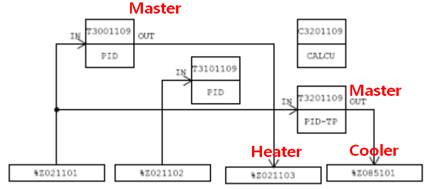
IV. 예시
① 기존 제어 Loop : Electric Heater를 제어하여 온도를 제어하는 Loop와 Cooling Water를 제어하여 온도를 제어하는 Loop가 독립적으로 구성되어 있으며 두 Tag의 설정치를 같도록 하는 Block이 있음.
② 문제점 : 같은 온도를 다른 두 개의 PID Controller가 동작하므로 Heating과 Cooling이 동시에 이루어지는 경우가 많음.
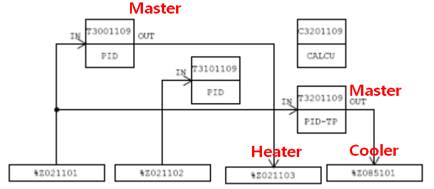
③ 개선된 제어 Loop : Heating과 Cooling이 동시에 이루어지지 않도록 구성.(동시에 이루어진다면 에너지 Loss 임) 즉, Cooler측이 완전히 Close된 후에 Heater측이 Open되고 Heater측이 완전히 Close된 후에 Cooler측이 Open되도록 하기 위하여 Yokogawa SPLIT control Function Block을 이용하였으며, 하나의 PID Controller가 동작하도록 구성.
B. PID Tuning Parameter 변경
I. 설명 : PID Parameter 를 변경해 제어성능을 향상
II. 원인 : 초기 Tuning 값을 입력한대로 추가 Tuning 을 하지 않았거나, Start Up Shut Down 시에 운전원이 특정 값으로 변경 후 변경 내역 관리가 되지 않아 잘못된 값이 그대로 유지되는 경우 발생함.
III. 대처방법 : PID Tuning Parameter 를 변경해 제어성능을 향상시킴.
IV. 예시
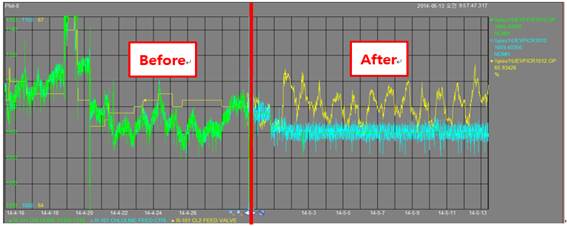
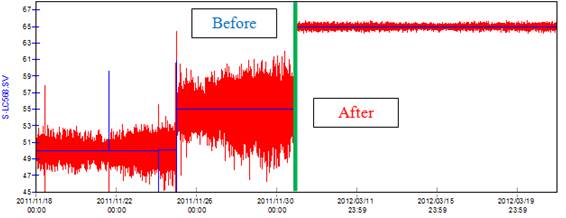
① A사 PID Tuning 개선 사례
② B사 PID Tuning 개선 사례
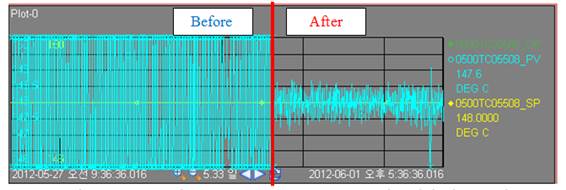
③ C사 PID Tuning 개선 사례 (MAN → AUTO 전환)